-

-

-

-

-
URLをコピーしました
【茨城地区活動紹介】IoT研究会③
-
-
-
-
-
URLをコピーしました

はじめに
このシリーズは、全2回の予定でしたが、その後も研究会の活動が続きました。そこで、まだお伝えできていない内容を「続編」として、第3回でご紹介します。
今回、「自動運転」をメインテーマに、自動で荷物を運ぶ仕組みの検討と試作を行いました。活動の概要やシステムの仕組み、シミュレーションでの検証結果、そこで見えてきた課題と、これからの方向性を、簡単にご紹介します。
開発システム(自動搬送システム:Autoware × AWS を用いた自動運搬の検討)
自動運転とは、ドライバー(人間)が行っている認知・判断・運転操作(加速・操舵・制動など)をシステムが代替する技術です。
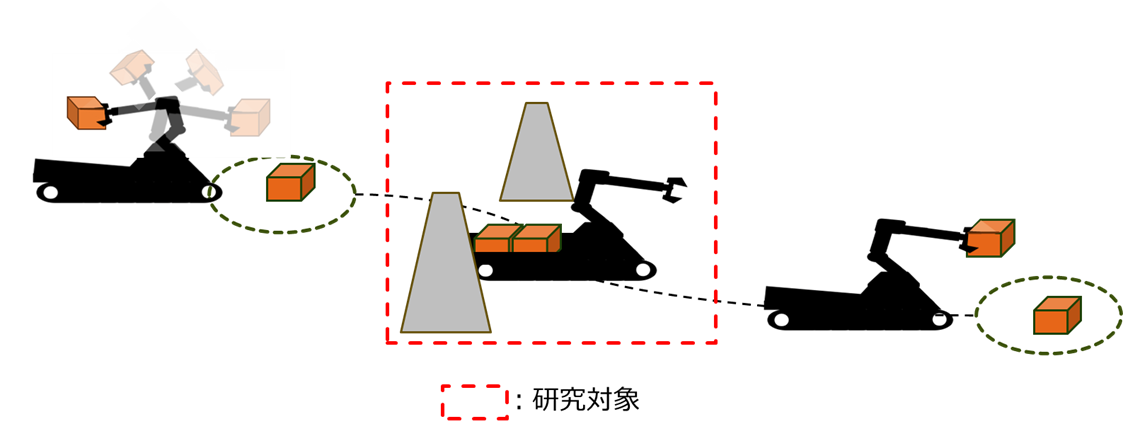
当研究会ではこの考え方を「自動運搬」に適用し、雑多に置かれた複数の物体から運搬対象を判別し、目的地まで自動で搬送するシステムを想定しました。倉庫や工場内の自動搬送をイメージし、センサ情報の取得から経路計画、走行制御までを一連の流れとして扱うことを目標としています。
システム構成
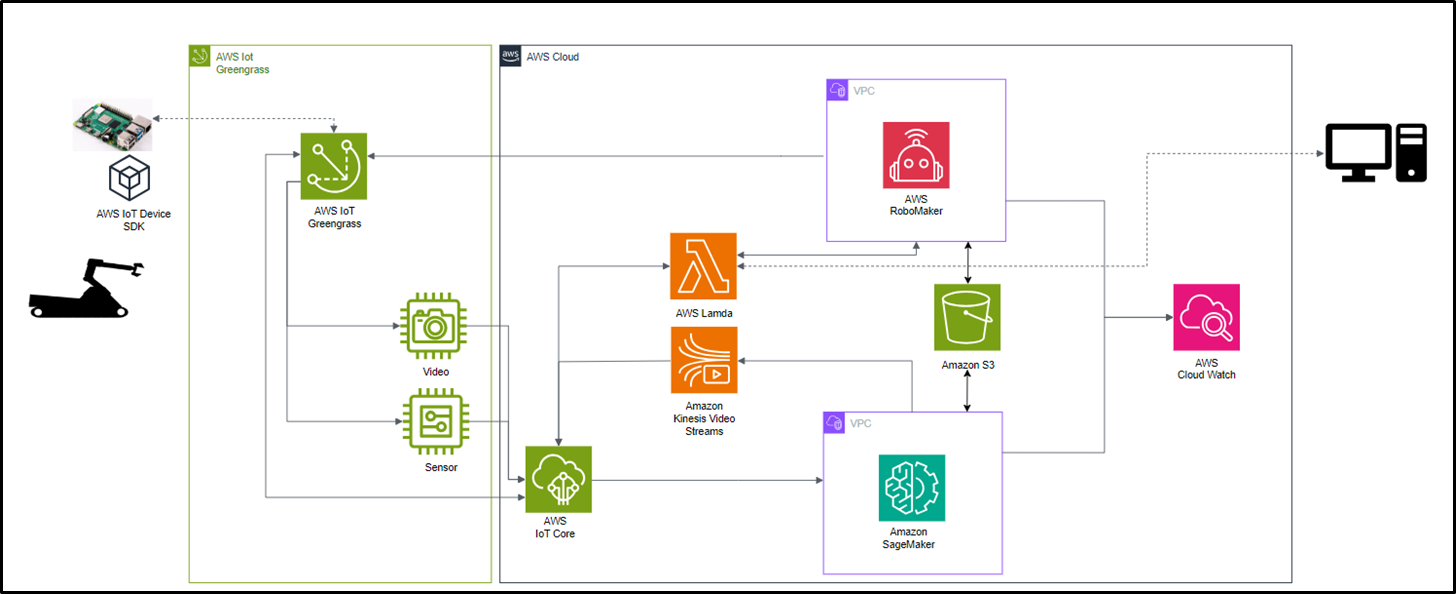
システム構成としては、(1) AWS を用いた構成と、(2) 自動運転向け OSS である Autoware を用いた構成の 2 系統を検討しました。
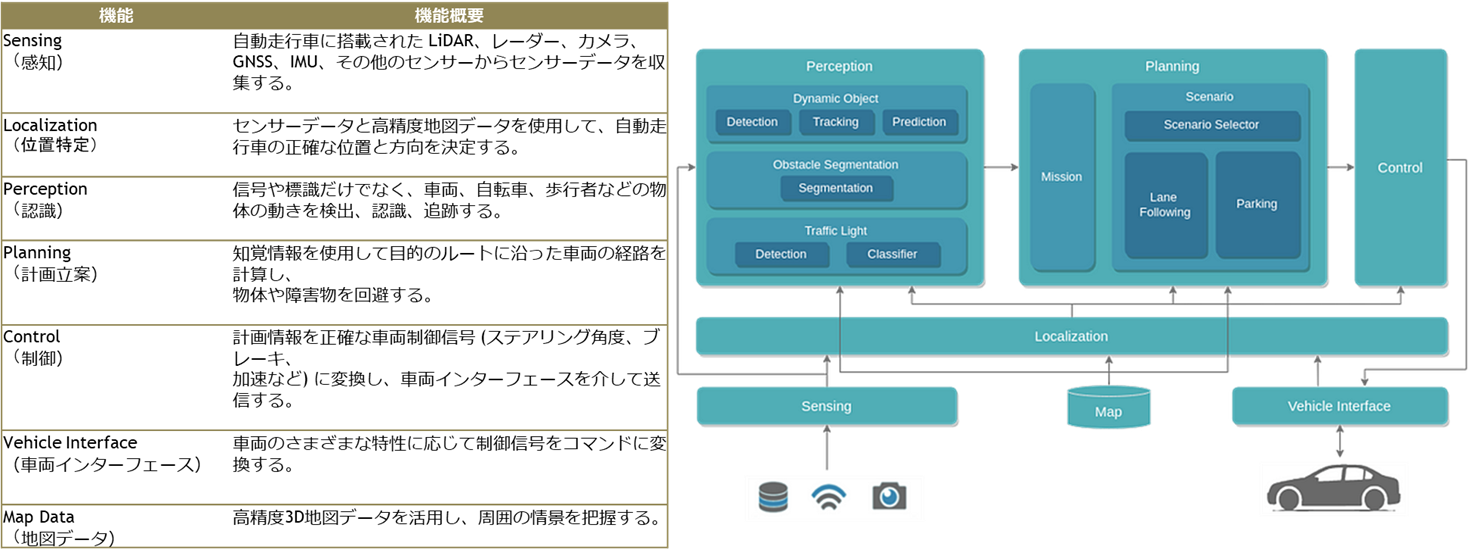
前者では、機械学習基盤 Amazon SageMaker を主軸とし、判別や経路計画の一部をクラウド側で処理する案を検討しました。後者では、ROS(Robot Operating System)ベースで自己位置推定・物体検出・経路計画・車両制御などを包括的に提供する Autoware を採用し、まずはシミュレーション環境での動作検証を優先しました。
Autoware を用いたシミュレーションでは、各種 Launch.xml ファイルにより車両モデル・センサ構成・マップデータなどを設定し、ros2 launch コマンドで Autoware とシミュレータを起動します。スタート地点・ゴール地点・障害物を定義することで、マップ上の経路や障害物回避の挙動を可視的に確認できました。
一方で、Launch ファイルの構成やパラメータの理解には一定の学習コストがあり、設定誤りにより期待どおり動作しないケースも多く、検証を通じてノウハウを蓄積している段階です。
(1)AWSを用いた構成
(2)Autowareを用いた構成
今後の課題
Autoware のビルド時にエラーが発生し、開発環境のスペック不足や依存ライブラリの差異が要因となって、環境構築に想定以上の時間を要しました。
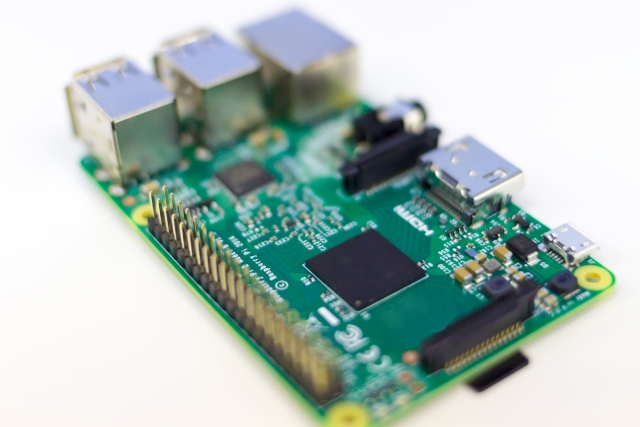
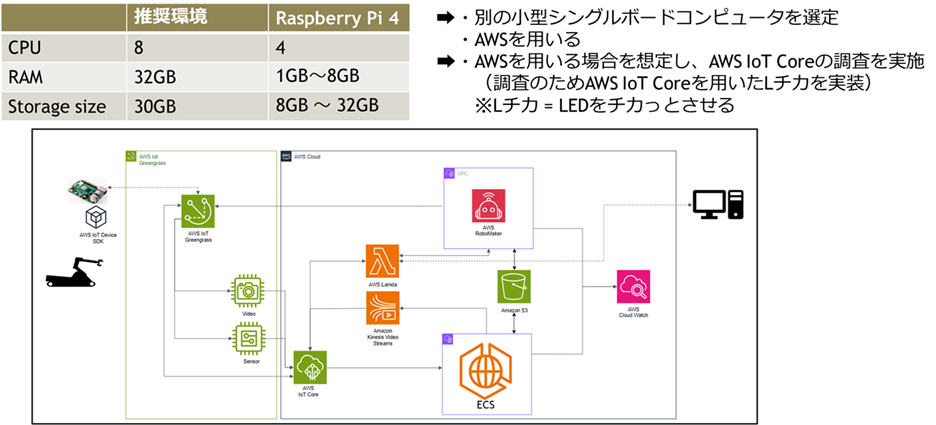
また、実機側では Raspberry Pi 4 を搭載する構成を想定していましたが、Autoware の推奨環境を下回る性能であることが判明し、別の小型シングルボードコンピュータの再選定や、処理をクラウド側(AWS)にオフロードする構成への切り替え検討が必要となっています。
クラウド連携構成の検討の一環として、AWS IoT Core を用いた基礎検証も行いました。IoT デバイスからクラウドへの接続と制御の流れを確認するため、AWS IoT Core 経由での「L チカ」(LED 点滅)を実装し、クラウドからの指示に応じてデバイス側 LED を制御するサンプルを作成しました。
これにより、MQTT を用いたメッセージ送受信やセキュアな接続設定など、今後の自動運搬システムに応用可能な基本的知見を得ています。
おわりに
今後は、マップデータおよび車両・センサ設定を見直した上でのシミュレーション継続と、Autoware の推奨環境を踏まえた実機ハードウェア構成の再検討が中心課題となります。併せて、環境構築手順や設定のポイント、トラブルシュート事例など、これまでに得られたノウハウを整理・文書化し、以降の研究会や実案件で継続検討していく予定です。
また、 IoT研究会としての活動は、自動運搬システムの実用化に向けた入口段階ではあるものの、Autoware や AWS といった技術を通じて、自動運転分野の基礎知識と実践的な経験を得る機会となりました。
今後も、本活動を通じて得られた知見を社内に共有しつつ、より具体的なユースケースやシステム適用を視野に検討を進めていきます。